|
I am a Ph.D. student in SSI lab and CURLY of Michigan Robotics, co-advised by Prof. Yulun Tian, and Prof. Maani Ghaffari. Prior to my Ph.D. program, I completed my Bachelor's and Master's degree in SNU, advised by Prof. Ayoung Kim leading RPM Robotics Lab. My research interets are Simultaneous Localization and Mapping (SLAM), manifold and optimization, which involve scalable and trustworthy state estimation for robotic application. I am particularly working on general scene representation using geometric primitives and relevant downstream algorithms. Email / Google Scholar / Github / CV / Linkedin |

|
|
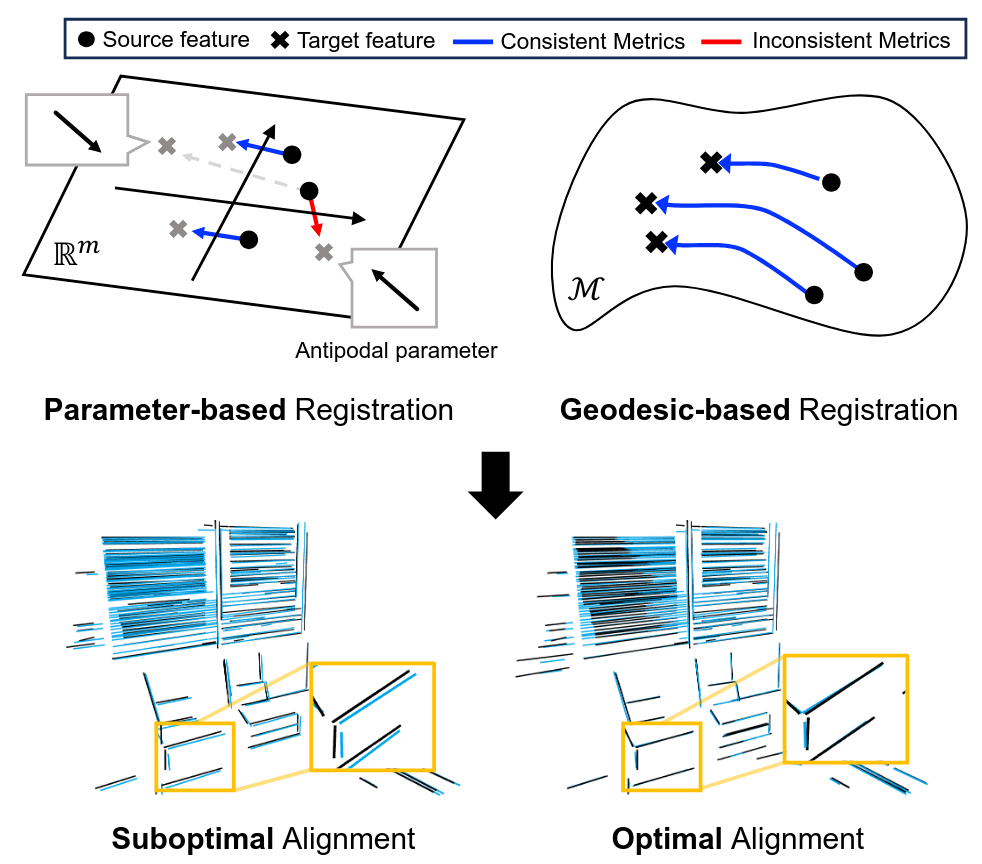
Registration beyond Points: General Affine Subspace Alignment via Geodesic Distance on Grassmann Manifold
Jaeho Shin, Hyeonjae Gil Junwoo Jang, Maani Ghaffari, Ayoung Kim, ICCV, 2025 (highlight paper) code / arXiv The first registration algorithm for geometric primitives with geodesic distance on Grassmann manifold. |
|
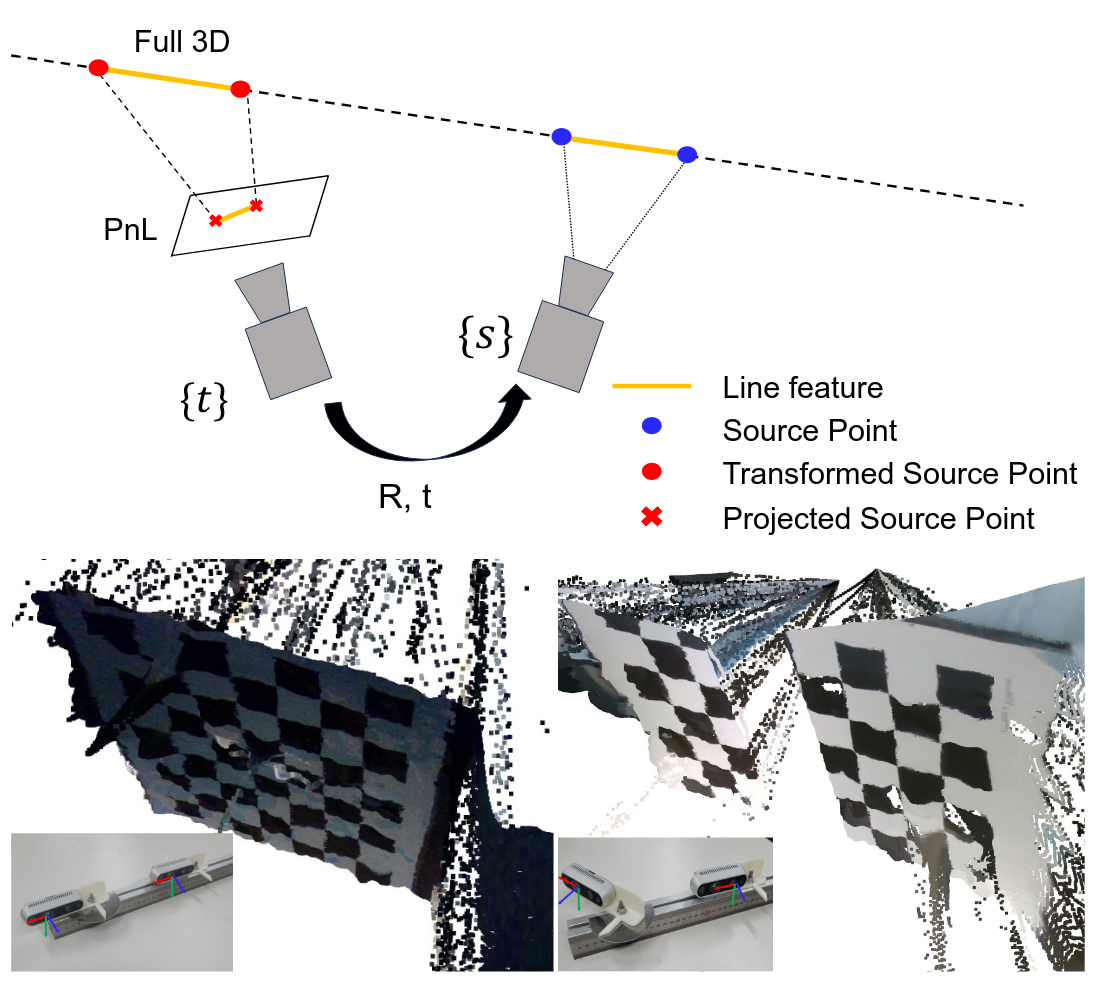
Pelical: Targetless extrinsic calibration via penetrating lines for rgb-d cameras with limited co-visibility
Jaeho Shin, Seungsang Yun, Ayoung Kim, ICRA, 2024 code / arXiv Online extrinsic calibration algorithm using 3D lines for RGB-D cameras regardless of overlapped view area. |
|
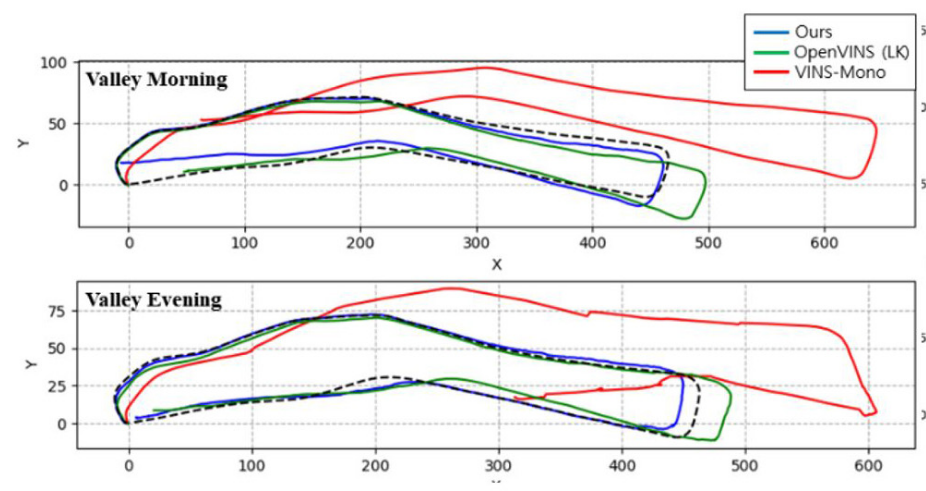
Infrared Visual Inertial Odometry via Gaussian Mixture Model Approximation of Thermal Image Histogram
Jaeho Shin, Myung-Hwan Jeon, Ayoung Kim, The Journal of Korea Robotics Society, 2023 arXiv Infrared visual inertial odometry algorithm with adaptive 8-bit conversion of infrared images. |
|
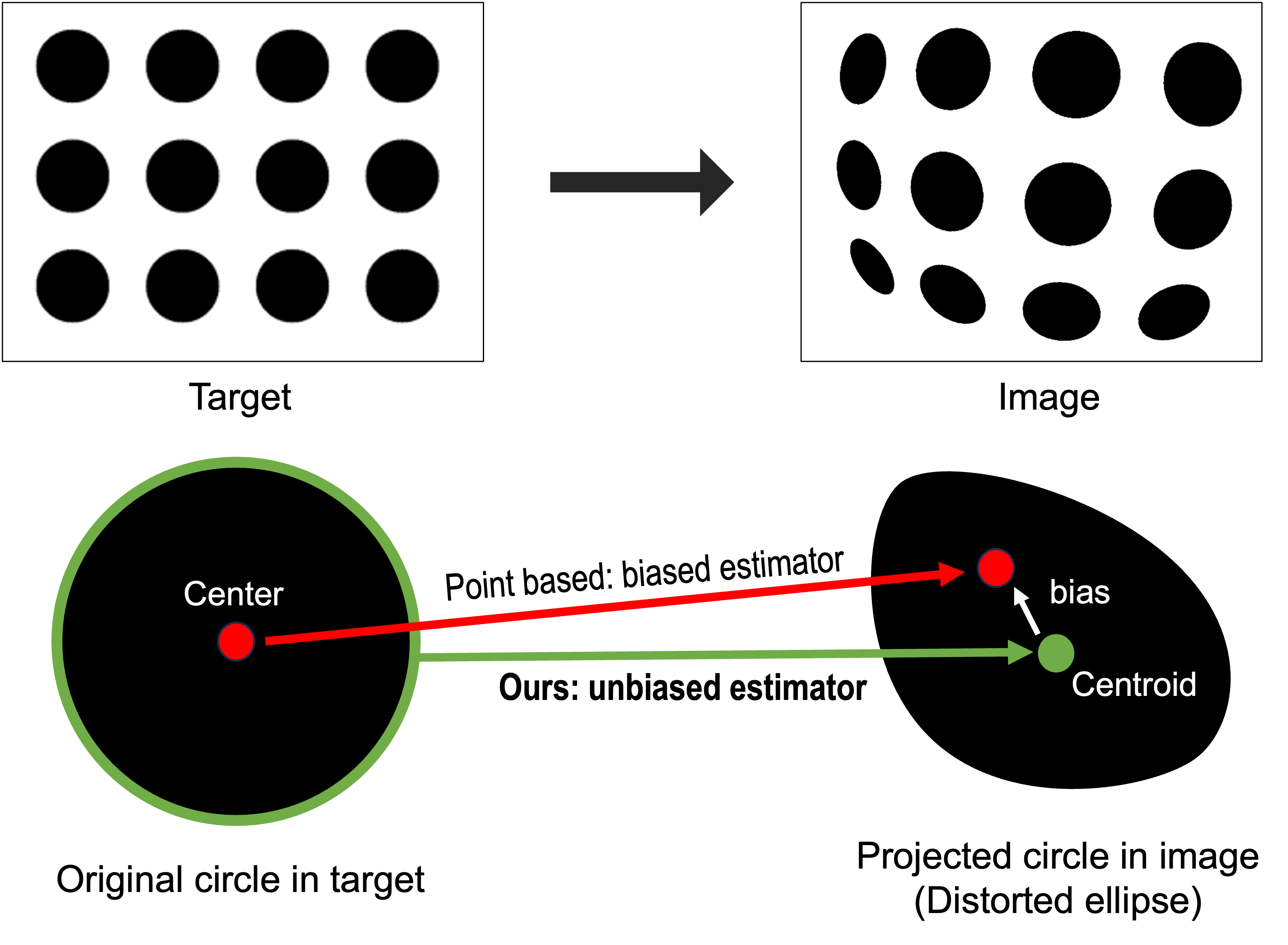
Unbiased Estimator for Distorted Conics in Camera Calibration
Chaehyeon Song, Jaeho Shin, Myung-Hwan Jeon, Jongwoo Lim, Ayoung Kim, CVPR, 2024 (highlight paper) video / code / arXiv The first analytic solution describing projected conic features under polynomial distortion |
|
|